Table of Contents
Geometry Properties
Fields living on the four-dimensional lattice are defined to be C arrays of elements using the data structures in the corresponding section. The geometry of the lattice is defined by assigning an index $n$ of the array to each site $(t, x, y, z)$. The mapping between the cartesian coordinates of the local lattice and the array index is given by the macros iup(n,dir) and idn(n,dir) which, given the index $n$ of the current site, return the index of the site whose cartesian coordinate in direction dir is increased or decreased by one respectively.
In the MPI version of the code the lattice is broken up into local lattices in addition to an even-odd preconditioning forming blocks of data in memory. Each of these blocks then corresponds to a contiguous set of indices. As a result, we need to additionally allocate field memory for buffers that we can use to send and receive information between different cores and nodes. In order to communicate correctly, we need to first fill the buffer of data to be sent. There are two different implementations of this in the code. The legacy geometry only supports compilation without multiple GPUs (WITH_GPU and WITH_MPI cannot be both enabled.). The new geometry supports also multi-GPU simulations.
Implemented patterns
New Geometry
The division of the local lattice into blocks, the location of the different buffers and buffer copies are described in a global array in Include/Core/global.h called geometryBoxes. This array contains structs of the type box_t located in Include/Geometry/new_geometry.h.
Every one of the boxes in geometryBoxes describes the even and odd part of a block or box in memory. The first box will be the master piece of elements that are not communicated, while every later piece in the array will describe a receive buffer. For example, I can find the number of odd sites in the master piece by writing the following code
I can find the volume of all buffers together, by iterating through the boxes after the first box, which is a master piece. We can iterate by using next.
Legacy Geometry
The division of the local lattice into blocks, the location of the different buffers and buffer copies are described in the following C structure in Include/geometry.h.
Here the iteration is encode by iterating over the pieces and then buffers, which are identified by an index ipx. The total number of pieces is encoded in the corresponding fields of the struct.
The buffer geometry is encoded in the elements rbuf_*, sbuf_*. We can find, for example, the full buffer volume by using the following code
Global Geometry Descriptors
Usually, we want to initialize fields either on the full lattice or only with even or odd parity. This is encoded by saving the information in the field struct of the field.
New geometry
We are using an enum gd_type to evaluate whether the field is EVEN, ODD or GLOBAL. We can check, whether a field is either of that by direct comparison
Further, we can use the numerical values saved in the enum definition, to check whether a field is defined on the even sites (EVEN or GLOBAL) or on the odd sites (ODD or GLOBAL).
For the new geometry, we split the lattice into master pieces and receive buffers. In contrast to the legacy geometry described in the next section, we do not need to distinguish between sites that are in the bulk of the lattice and sites that are on the boundary and have neighbors in the receive buffers.
Legacy geometry
The global geometry descriptors glattice, glat_even and glat_odd are initialized globally on host memory. These can then be used to allocate fields correspondingly. We can then query geometry information by using the type field. For example, checking whether a field is even or odd would work in the following way:
Number of Sites
In order to allocate memory for the field data, we need to know how many elementary field types we need to allocate. This is different for fields that are located on the sites or the links of the lattice. Correspondingly, for the given lattice geometry, the number of sites and the number of links are calculated and saved in the fields gsize_spinor and gsize_gauge respectively.
Master Pieces
A piece is called master if it does not contain copies of other sites, as for example is the case for buffer pieces. These are copies of sites already stored in a master piece.
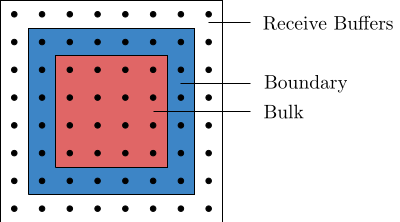
For the old geoemtry implementation, the sites in a master piece can be categorized by their function in computation and communications.
- Bulk elements/inner elements
- Function in computation: Computation performed on bulk elements does not need communication because the sites in the bulk only depend on sites on the boundary, which are already accessible from the thread.
- Function in communication: No sites any of the local lattices in other threads depend on the sites in the bulk of this lattice, they do not need to be communicated.
- Boundary Sites, which are sites located on the boundary of the local block
- Function in computation: The boundary element need to be calculated separately from the bulk, because they depend on sites in the extended lattice and these elements need to be communicated first.
- Function in communication: Boundary elements of a local lattice are halo elements of another. As a result, they need to be communicated.
- Halo Elements/Receive buffers, the bulk and boundary plus halo form the extended lattice.
- Function in computation: Halo elements are only accessible to the thread in order to perform the calculations on the boundary, usually, we do not want to perform calculations on the halo. One exception, however, is, if the computation is faster than the communication, it might be easier to perform the operations on the extended lattices without communication, rather than only computing for bulk and boundary and then synchronize the extension.
- Function in communication: We synchronize the extended lattice by writing to it so that this data is available to the current thread, but never read from and communicate the extended lattice somewhere else.
The following figure depicts these categories of sites on a two-dimensional $4\times 4$-lattice.
A single boundary communication between two 2D local lattices would accordingly work as in the following illustration
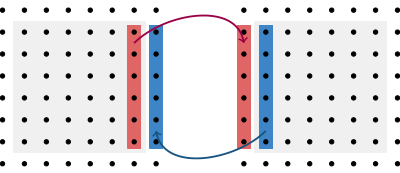
Here the boundary elements are being communicated to the respective boundary of the other block. Bulk elements are unaffected.
Inner Master Pieces
The first decomposition of the lattice site is the even-odd preconditioning. This splits any lattice in two pieces: an even and an odd one. These pieces are stored contiguously in memory meaning that at the first indices one can only read sites of the even lattice and after an offset we are only reading odd sites. For an even-odd preconditioned lattice the number of inner master pieces is therefore two and can be accessed in the variable inner_master_pieces of the geometry descriptor. In this context, an inner master piece comprises all sites that are in the bulk of a local lattice of given parity.
Resultingly, there is a shift in the local master piece block that is the starting index of the odd sites. For this, one can use the field master_shift. This field contains the offset of a lattice geometry relative to the full lattice. The even lattice is not offset and overlaps with the first half of the full lattice. The odd lattice, however, overlaps with the last half, so it is offset by half the number of lattice points compared to the full lattice. As a result, the odd lattice geometry, saved in the global variables as &glat_odd has the master_shift agreeing with the first index of the odd block of the full lattice.
which corresponds to a full lattice being decomposed like the following illustration:

Local Master Pieces
The local master pieces are the pieces of local lattices, the blocks that the lattice is decomposed into to be processed either by a single thread/core or GPU. For example, take a lattice of size $8^3\times 16$ split up with an MPI layout of 1.1.1.2 into two local lattices of size $8^4$. Due to the even-odd preconditioning the blocks are further split up into two. The field local_master_pieces identifies the number of local master pieces. In this case the integer saved in local_master_pieces is equal to four. This is saved in memory in the following way: First the even parts of the two blocks and then the odd parts.

Total Master Pieces
Additionally, the geometry descriptor contains two numbers of total master pieces, one for spinors and one for gauge fields. This counts the number of local master pieces plus the number of receive buffers, but not send buffers. This is exactly the extended lattice in the directions that are parallelized, i.e. the global lattice is split in this direction. Iterating over the total number of master pieces equates therefore to an iteration over the local lattices including their halo regions.
The number of interfacing elements does not only depend on this decomposition but also whether the saved field is saved on the lattice links or sites. Consequently, while the master pieces are identical, the buffer structure depends on whether the field that needs to be communicated is a gauge field or a spinor field. For this, the geometry descriptor contains both an integer for the total number of master pieces for a spinor field and the total number of master pieces for a gauge field. Additionally, there are fields that contain corresponding counts of buffers for both field geometries, nbuffers_spinor and nbuffers_gauge.
Block Arrangement in Memory
In order to work with the block structure efficiently and optimize memory access patterns, the sites belonging to a single piece are stored consecutively in memory. Since the field data is stored in a one-dimensional array, we can access the sites stored in a block by consecutive indices. As a result, in order to access all sites in a block, we need to know the index where it starts and where it ends. This information is stored in the arrays master_start and master_end.
Here, every block is identified by an index, in the code often called ixp. The mapping of the index to the block is persistent but arbitrary and therefore subject to convention. In memory, and correspondingly at site index level, the blocks are stored such that first there is a large block of field data of local lattices with even parity and then with odd parity. However, at block index level, the even ixp identify even lattices and odd ixp odd lattices, with lattices of two parities belonging to the same local lattices adjacent. This means for example, that if the even part of my local lattice is stored at ixp=4, then the odd part can be found at ixp=5. For a simple decomposition into two blocks with even-odd preconditioning are arranged in memory as in the following illustration

with block indices being assigned in a non-contingent way described above.
In order to find the starting index of a piece with index 5 belonging to a decomposed spinor field, one would write
One could find out the length of the block, which is not necessarily constant, by writing the following
OpenMP
The integers
are necessary for optimizing communications between cores on a single node.
Optimizing Communications
The legacy geometry implemented a difficult scheme to make sure, that the sendbuffers that are located on the boundary of the lattice are stored contiguously in memory, so that they can be copied as a single block by MPI. It is, however, simpler, to store the elements of the master pieces in whichever way without distinguishing boundary (send buffers) and inner elements. Therefore, for the new geometry, a sync operation reads out elements from the boundary to a designated sendbuffer which in turn is then send to the other process. This simplifies the field geometry and has minimal impact on performance, which might be compensated by simplifying field operations.
Legacy Geometry
As already described the local blocks decompose further into even and odd pieces, sites of the halo, boundary and bulk. We want to access these pieces separately, because they have different roles in computation and communication. Manipulating these different elements in the field data therefore requires different code. However, in order to conserve optimal access patterns, every data access has to be an access to a single block of contiguous memory. When storing all sites in the extended lattice naively, one might have to access multiple blocks of memory for a particular computation or communication step. This negatively impacts memory access performance due to suboptimal bus-utilization, data reuse and automatic caching patterns. The challenge is, therefore, to arrange the sites in memory in such a way that every memory access is an access to a single continguous block of memory.
As a result, we want to store the data in a local block first of all in such a way, that the inner sites are all consecutive, are then followed by boundary elements and finally halo elements/receive buffers.
Boundary and Receive Buffers
Here in particular the arrangement of the boundary elements is crucial, because different overlapping parts of the boundary are requested by different nodes. At this point, we do not need to worry about the concrete arrangement of points in the bulk, because computations on the inner points can be executed in a single block, a caveat being discussed in the next section.
We arrange memory as in the following 4-by-4 2D example
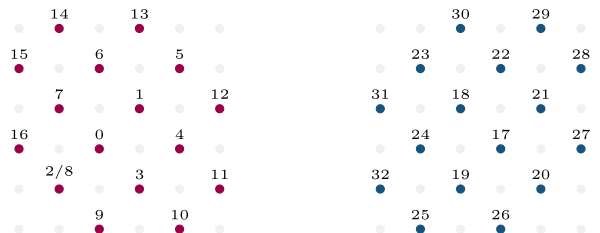
- The lattice is decomposed into an even and an odd part, which are contiguous in memory respectively. The first index with an odd entry, the master shift of the odd lattice, is 17.
- The bulk consists for each sublattice of only two sites. Sites 0-1 and 17-18 are the inner sites of the even and odd lattice respectively.
- We do not need to consider the edges of the square in the extended lattice, because they are not used in any computations, since they are not neighbors to any of the sites in the local lattice.
- For the even lattice we walk around the inner sites to label the boundary elements. If this local lattice is parallelized in both dimensions, then we need to exchange all boundary elements with other nodes. 2-3 with another node, then 4-5 and then 5-6. These three memory accesses do no pose a problem, since they are continguous. However, the next send buffer will try to access elements 7 and 2. These are not contiguous. As a result, we have to allocate space for site 2 twice, so that we can copy it, to a site with index 8. We have to make sure that whenever we need this information, it is in sync with the information stored at site 2.
- We can now proceed to label the receive buffers. Here we want the memory that we write to again be contiguous. This works out naturally, the receive buffers are 9-10, then 11-12, then 13-14 and finally 15-16.
- Proceed analogously for the odd lattice. In contrast to the even lattice, we do not have any holes in the numbering.
Bulk Arrangement
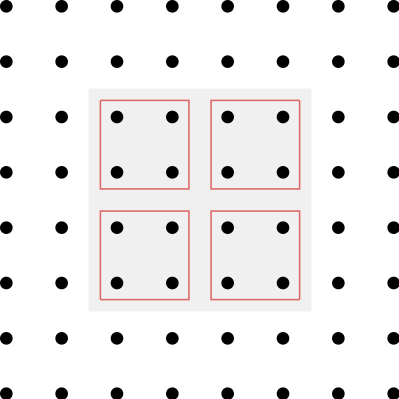
As mentioned above, inner elements are always accessed as a block in memory and therefore the accesses are continguous. However, the order of access can have an impact on L1 and L2 caching and therefore the speed of memory transfer. Caching is optimal, if the bulk elements are subdivided into smaller block elements. This is implemented under the name path blocking. The dimensions of the bulk subblocks are stored in the global variables (Include/global.h)
as PB_T, PB_X, PB_Y and PB_Z. On a 6-by-6 2D lattice PB_X=2 and PB_Y=2 would imply a decomposition as in the following illustration
Buffer Synchronization
For complex decompositions, that are usual in lattice simulations, the blocks have to communicate in a highly non-trivial way. For example decomposing a $32^3\times 64$ lattice into $8^4$ local lattices requires 512 processes to communicate the three dimensional surfaces of each four-dimensional local lattice with all interfacing blocks. In order to perform this communication we need to know both the indices of the sending blocks and map them to the receiving blocks. This information is stored in the arrays rbuf_from_proc and sbuf_to_proc, which tell us which processes send to which processes by id, and further the arrays rbuf_start and sbuf_start, which tell us at which index in the local lattice we need to start reading. We can iterate through these arrays to find pairs of sending and receiving processes and perform the communication. The size of the memory transfer is further stored in the array sbuf_len and rbuf_len.
The number of copies necessary depends on whether the field is a spinor field or gauge field and saved in the fields nbuffers_spinor and nbuffers_gauge.
Field Operations
Even-Odd Decomposition
CPU
A sufficiently local operator only operates on the site value and its nearest neighbors. As a result, we can decompose the operation into a step that can be executed site by site and is therefore diagonal and another step where every site only depends on the nearest neighbors. This we can further decompose into two steps, one acting on the even lattice sites while the odd sites are frozen and then another step acting on the odd lattice sites while the even ones are frozen. As a result, this decomposition enables us to effectively evaluate local operators on the lattice because it can be done in parallel, using multiple CPU cores or GPUs. In order to efficiently work with this decomposition on the CPU and the GPU, the even and odd sites are stored in separate blocks on the lattice. This means for the CPU that for a field that is defined on both even and odd sites, one can easily iterate through the even sites by iterating through the first half of the allocated memory.
For example, for spinor fields, iterating through the even sites mechanically works as in the following:
We only iterate through half the lattice points. Iterating through the odd sites requires us to know the offset at which the odd indices begin. All information regarding lattice geometry is stored in the geometry descriptor.
In practice, the programmer should not be forced to think about lattice geometry. For this, the corresponding for loops are replaced by the macros _PIECE_FOR, _SITE_FOR and _MASTER_FOR that are defined in Include/geometry.h.
_MASTER_FOR
This macro iterates over all sites without considering which piece they are located. For example, for the spinor field, this would simplify to
Take $V$ to be the number of lattice sites. Then ix runs from 0 to $V-1$. If the lattice geometry is given as even, it runs from 0 to $\tfrac{V}{2}-1$. If it is odd, it runs from $\tfrac{V}{2}$ to $V-1$. It is possible to iterate over an even spinor in the following way
Nevertheless, iterating over an odd spinor the same way will yield a segmentation fault. This is because, in the odd spinor, only the odd sites are allocated starting at 0. As a result, we need to iterate from 0 to $\tfrac{V}{2}-1$ for the odd spinor. This, however, clashed with the fact that if we have a spinor that is defined on all lattice sites, we want to have the indices start at $\tfrac{V}{2}$.
- To solve this problem, instead of accessing the elements directly, there is a macro that correctly accesses given a global index provided by either
_SITE\_FORor_MASTER_FOR:_FIELD_ATinInclude/spinor_field.h. The right way to iterate over any geometry is to use the following pattern, with the corresponding geometry substituted in the allocation function.
_PIECE_FOR Depending on the operation we need to perform on the field, we might need to know whether we are currently operating on the even or the odd part of the field. Leaving aside MPI decomposition, which will be explained later, the field is decomposed into only two pieces: The odd and the even part. If the spinor is only odd or even and there is no further MPI decomposition, there will be only a single piece. An index labels the pieces often called ixp in the order they appear in memory. Therefore (without any MPI decomposition), the even part has the index ixp=0, and the odd part ixp=1.
_SITE_FOR We can now decompose the _MASTER_FOR into _PIECE_FOR and _SITE_FOR. This might be necessary if we want to iterate over the sites and always have the information on which piece we are currently operating.
GPU
We will not want to use any for-loop macros to iterate over the sites on the GPU. Instead, we want to distribute the operations on the sites over different threads. Further, in anticipation of a later MPI decomposition, any kernel operation on the fields should launch a separate kernel for each piece. At the point of a simple even-odd decomposition, we need to do the following:
- Wrap the kernel call in
_PIECE_FOR. This will take care of any block decomposition identically to the CPU. - Only pass the odd or even block to the kernel at the correct offset. The global thread/block index will then be used to iterate over the sites, and we do not need to worry about any global indices. All the kernel knows about is the block. This serves as a replacement of
_SITE_FOR. - Read out the field value for a given local block index having only the offset starting pointer at hand. Due to the special memory structure discussed in the next section, this has to be done using the GPU reading, and writing functions declared in
Include/suN.h. These serve as a replacement to_FIELD_AT. They are not completely analogous because, depending on the structure, they do not read out the complete site. For the spinor field, for example, the reading must be done spinor component-wise.
For a spinor field in the fundamental representation, one would use the function read_gpu_suNf_vector because the components of the spinor are vectors, and it is necessary to read the spinor vector-wise. Further, to only pass the block the kernel is supposed to operate on, we are using the macro _GPU_FIELD_BLK in Include/gpu.h. This macro takes the spinor field and the piece index ixp and returns the starting pointer of the local block in the GPU field data copy.
Reading an element of the gauge field is slightly different. We can transfer the loop over the different pieces, but since the gauge field is a vector field, we have more components to consider. Therefore we need to replace _GPU_FIELD_BLK with _GPU_4FIELD_BLK. For the gauge field the readout functions is simply read_gpu_suNf, which is also located in suN.h. This function reads out the vector component-wise.
The writing functions work analogous.
Contingency
These reading and writing functions are necessary to access memory in a contingent way when performing operations on the fields. If we store the spinors in the same way they are stored on the CPU this will not be contingent. To understand the problem, we can look at the implementation of the inner product of two spinors at the kernel level.
In every thread we iterate over the components of the input arrays s1 and s2. Which are located at the same site. The different threads in this kernel now operate on the different sites of the lattice. Now, when this kernel is launched, the threads all try first to access all the first elements of all sites. However, when the sites are stored identically as on the CPU, this means that we access memory segments separated by a stride, as in the following illustration:

We can optimize this significantly by not saving one site after another but instead saving first all first components, then all seconds components and so on in the order they are accessed in the loop.

This means that memory is accessed contiguously as a single block. This is more efficient because it maximizes bus utilization and L1 cache hit rate.
Spinor Fields
At a code level, this is achieved by requesting the start pointer at a given index as usual, then performing a cast to the corresponding complex type and writing or reading from memory a stride away. For example, if one wanted to read out the second component of the first component vector of a spinor on the CPU, one would do that as follows
On the GPU, this would be done in the following way
This shuffles how the structs are organized in the previously allocated space.
Gauge Fields
For the gauge fields for every site, there are four link directions. Since the matrices stored on the links can be complex or real, the real and imaginary part of the matrices are additionally separated by a stride.